Related
Table of content
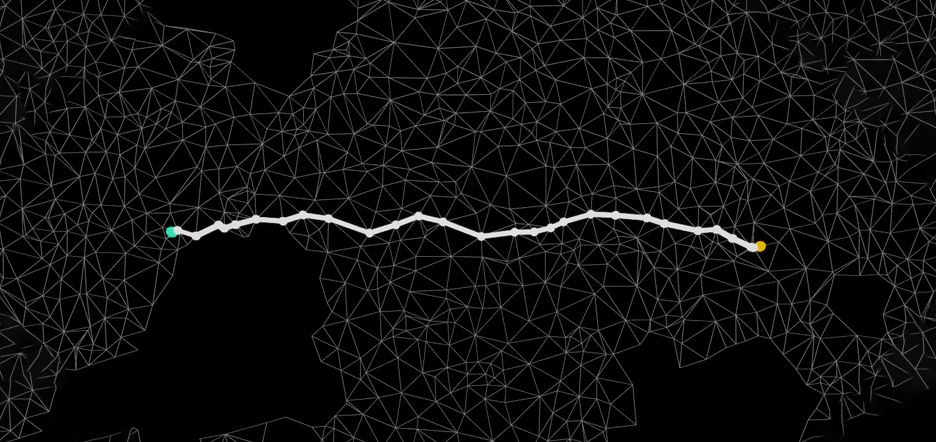
The Edges Pathfinding node connects goal points to seed points. Contrary to the ![]() Plot Edges Pathfinding, this node uses an external module (Goal Picker) to match seeds and goal, and cannot generate closed paths; it only supports A to B (many of them as well).
Plot Edges Pathfinding, this node uses an external module (Goal Picker) to match seeds and goal, and cannot generate closed paths; it only supports A to B (many of them as well).
Properties
| Property | Description |
|---|---|
| Goal Picker | The module that will be used to interpret and manipulate goals and seeds inputs. Each module has individual settings and documentation – See Available Goal Pickers. |
| Property | Description |
|---|---|
| Plot inclusiong | |
| Add Seed to Path | Prepends the seed position at the beginning of the output path. This will create a point with the position of the seed. |
| Add Goal to Path | Appends the goal position at the end of the output path. This will create a point with the position of the goal. |
| Path Composition | Whether the output paths are made from Vtx or Edges points. |
| Picking | |
| Seed Picking | Lets you control how the seed node (Vtx) will be picked based on the provided seed position. |
| Goal Picking | Lets you control how the goal node (Vtx) will be picked based on the provided goal position. |
| Search Algorithm | Let you pick which |
Modules
Available  🝓 Goal Pickers modules
🝓 Goal Pickers modules
🝓 Goal from Attribute
Match seed with goals picked at an attribute-specified index.
The Goal from Attribute picker …
![]()
Available  🝰 Heuristics modules
🝰 Heuristics modules
🝰 Heuristic Attribute
Attribute-driven heuristics
The Attribute heuristics uses custom point or edge value as raw score.
![]()
🝰 Feedback
Favor uncharted points & edges.
The Feedback heuristic add/remove score value to points & edges that are “in use” by other previously computed paths.
![]()
🝰 Inertia
Favor active direction preservation.
The Inertia heuristic uses the ongoing traversal data to try and maintain a consistent direction, as if the algorithm had “inertia”.
![]()
🝰 Steepness
Favor flat trajectories.
The Steepness heuristic uses the edge angle against an up vector to compute a dot product that is used to determine whether the edge should be considered flat or not.
![]()
🝰 Azimuth
Favor edges directed toward the goal.
The Azimuth heuristic attempt to force the path to always aim toward the goal.
![]()
🝰 Least Nodes
Favor traversing the least amount of nodes.
The Least Nodes heuristic favor node count traversal over anything else.
![]()